Competitor Performance Comparison¶
The Boron Canandgyro is rated for some level of in-motion and and no-motion drift. But how does it stack up to the competition? Below, we have performed some performance comparisons between the Boron and a couple other gyros common in FRC.
Units tested¶
Boron CanandGyro
Competitor “Avian” CAN Gyro #1
Competitor “Avian” CAN Gyro #2
Setup¶
The three gyros were stacked on top of each other and secured to a fixture with screws. The fixture was mounted to a motorized jig to automate testing.
Results¶
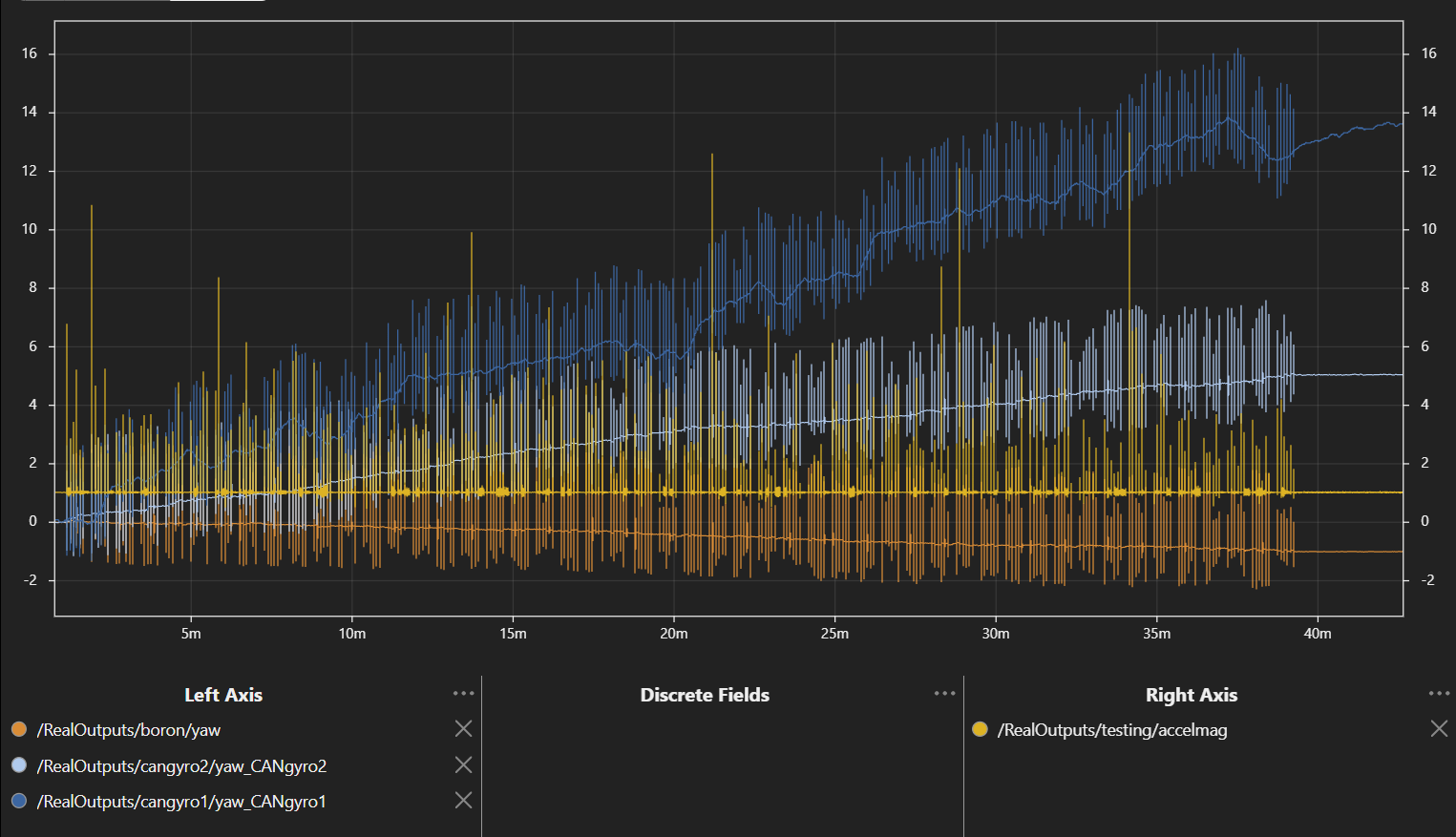
Yaw No-Motion Stability¶
No-Motion Stability is the error in Yaw when the gyro is left unmoving for long periods of time.
The gyro fixture is calibrated, zeroed, and then left sitting still for eight hours. Yaw error is logged. The highest slope in any one-hour period and the average slope over eight hours is recorded.

Parameter |
Boron |
CAN Gyro 2 |
CAN Gyro 1 |
|---|---|---|---|
Average Drift in 8 Hours (°/hr) |
0.009 |
0.034 |
15.9 |
Max Drift in 1 Hour (°/hr) |
0.098 |
0.125 |
15.9 |
The Boron has significantly lower no-motion drift than the competition.
In the context of an FRC application, both the Boron and CAN Gyro 2 perform admirably. CAN Gyro 1 has enough drift to cause issues if a robot were to be left sitting for a few minutes before a match.
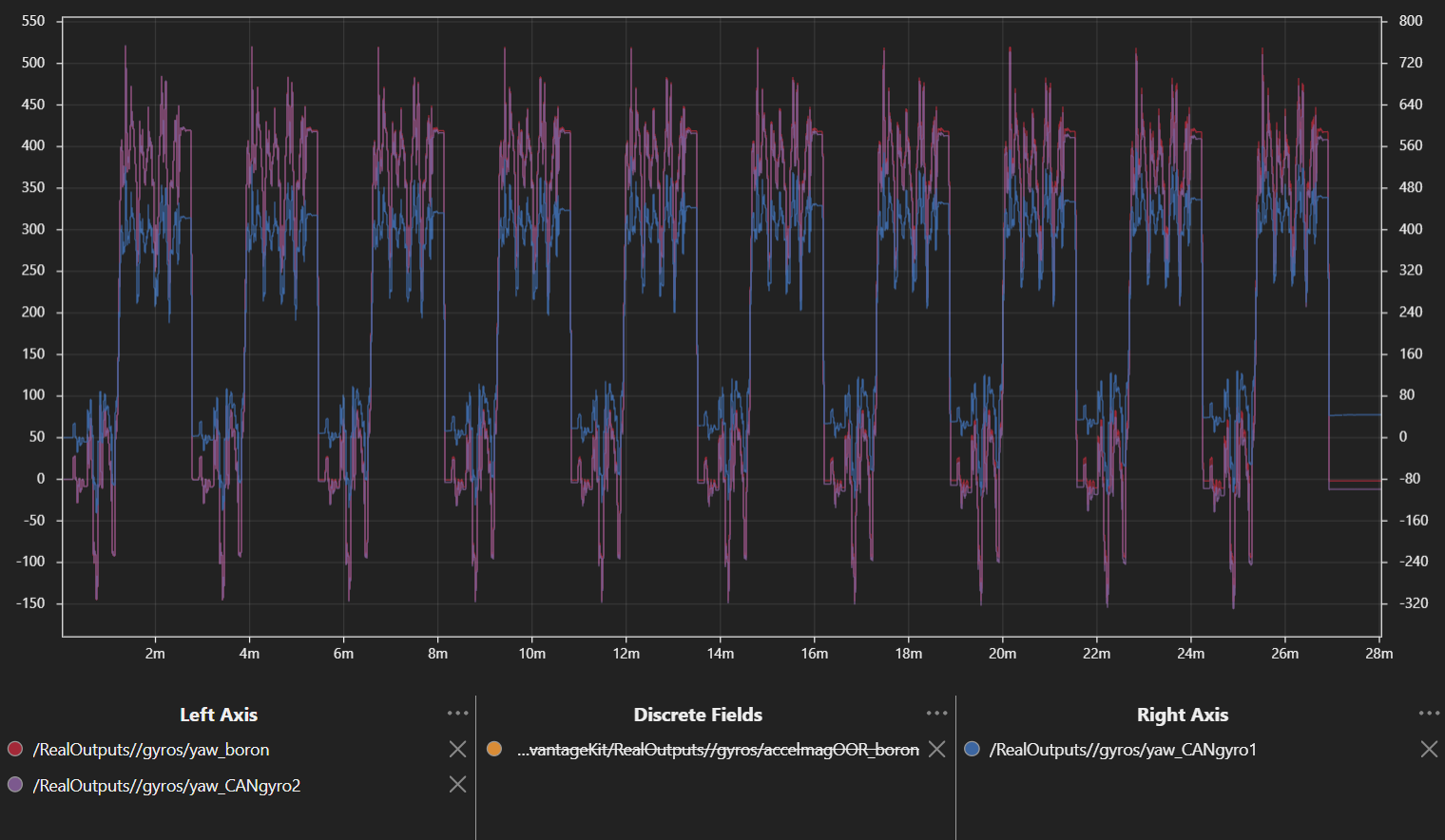
Yaw Motion Stability¶
Yaw Motion Stability is the accuracy of a gyro while rotating about the Z axis.
This test runs the gyro through a 150-second simulated FRC match. The fixture is vibrated while a stepper motor rotates the gyro to angles recorded by a real FRC robot during a logged match. The motor is returned to an angle of 0 after the test and the error of the gyro is recorded. This test is repeated 10 times without zeroing, allowing for 30 seconds of rest between trials. The total test time is 38 minutes. The drift per minute was calculated by dividing the drift for a single “match” by 2.5 minutes. The first match is discarded to allow the test fixture to settle repeatably.
Parameter |
Boron |
CAN Gyro 2 |
CAN Gyro 1 |
|---|---|---|---|
Average Drift (°/min) |
0.18 |
0.50 |
1.76 |
Max Drift (°/min) |
0.32 |
0.80 |
2.14 |
The Boron has much lower in-motion drift than the competition.
The fixture has more random vibration than a typical FRC robot would have. This increases the drift to closer to what would be seen in an FRC match. Non-FRC applications may see varying vibration as well, such as engine vibration in cars. If your application has heavy vibration or very frequent collisions, you may experience more in-motion yaw drift. Many factors go into a good in-motion drift test, and it’s impossible to capture all of those in a single test. In repeated runs of this test, the Boron averaged anywhere from 0.11 to 0.40 deg/min of drift, and CAN Gyro 2 averaged 0.30 to 0.97 deg/min of drift. Running different match profiles also affected the drift. This test should be viewed as a point of comparison between products, and not necessarily an example of the exact performance you will get with a Boron.
Shock Stability¶
The gyro fixture is rapidly rotated to 2 degrees, the back to 0 degrees, with acceleration between 1-8g, to simulate a mechanical shock. 6 shocks are performed in one cycle, and the fixture is allowed to rest for 15 seconds to settle to a final yaw after a full cycle before each measurement is taken. 50 cycles were performed (300 total shocks)
Parameter |
Boron |
CAN Gyro 2 |
CAN Gyro 1 |
|---|---|---|---|
RMS Drift (°/impact) |
0.005 |
0.019 |
0.095 |
Worst Drift (°/impact) |
0.010 |
0.040 |
0.257 |
The Boron has the best shock resistance of the gyros tested.
The settling time is included as part of the yaw drift because sudden shocks can sometimes throw off a gyro calibration, resulting in drift for a few seconds after a shock as the gyro corrects itself. The Boron has been designed to be highly resistant to sudden shocks, which is why its drift during and after impact is so low.
The RMS drift is shown instead of the average drift to weight greater heading failures more strongly.
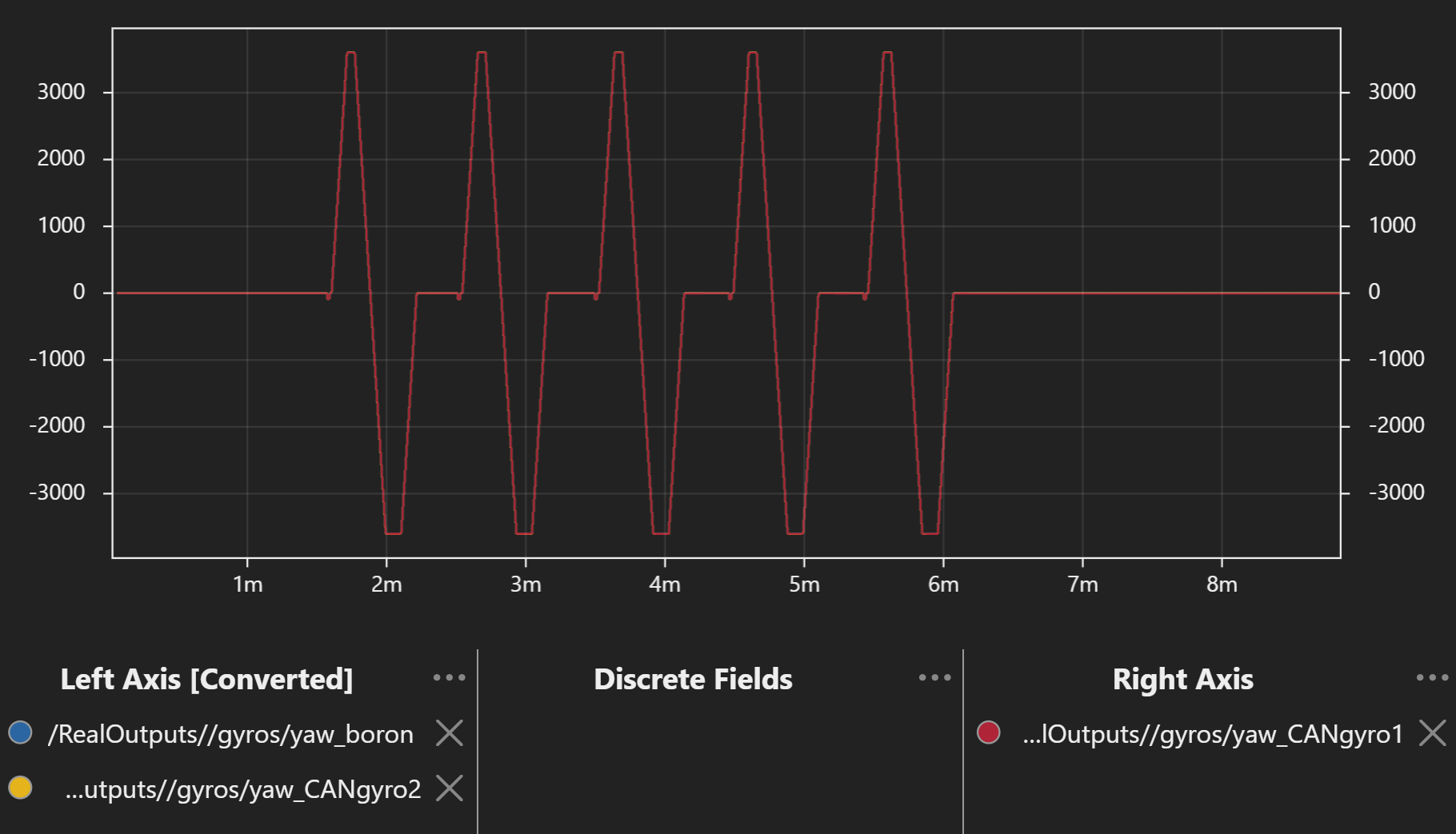
Yaw Sensitivity¶
Gyro sensitivity is how much error a gyro accumulates when rotating in a single direction for multiple revolutions. Rotating the gyro the other way until the original zero is reached will cancel out sensitivity errors.
This test spins the gyro 10 rotations counter-clockwise and reads the angle. Then, it spins it 20 rotations clockwise and reads the new angle. The gyro is then returned to zero. The gyro has the yaw zeroed before repeating the test. The sensitivity error is equal to the average yaw error per rotation. Sensitivity is a constant for each gyro, so we do not need to test the maximum.
Parameter |
Boron |
CAN Gyro 2 |
CAN Gyro 1 |
|---|---|---|---|
Average Sensitivity Error (°/rev) |
0.04 |
0.34 |
0.13 |
The results of this test rely highly on the quality of the calibration performed on each unit. Small differences in the mounting or fixture repeatability create sensitivity error, and it’s easy to tune a “golden sample” to have almost zero sensitivity error. At Redux, we strive to make sure every gyro has a yaw sensitivity error of less than 0.1 degrees per revolution.
Note that the Boron is not tuned for sensitivity in the pitch (x) and roll (y) axes. Typical pitch and roll sensitivity error is better than 1%, meaning that a dynamic roll of 10 degrees would have up to 0.1 degrees of error. For applications that do not undergo multiple full rotations, this should not be perceptible. Accelerometer correction of pitch and roll will correct any errors after a few seconds of no-motion.